Geofumadas Coordenadas Google Earth, Rutinas lisp, Curvas de nivel, bloques autocad, curso arcgis
Geofumadas Coordenadas Google Earth, Rutinas lisp, Curvas de nivel, bloques autocad, curso arcgis
La generación de un mapa utilizando esta técnica puede llegar a ser un gran problema, uno de esos problemas es tan crítico con las consecuencias de perdida de valiosos meses de trabajo útil cuando no se tiene experiencia previa en esta tarea.
Los fundadores de Aerotas Mapping System nos hablan en un artículo de POB Online, que muchos topógrafos enfocan este trabajo, primero, discutiendo el tipo de dron que adquirirán para luego, enfocarse en debatir las características del producto final que desean obtener, produciéndose como resultado, la extensión innecesaria del tiempo que comentamos.
Frente a esta situación, lo aconsejable, que conlleva a mayor eficiencia y rentabilidad, estriba en comenzar por el resultado a obtener, identificando la secuencia de trabajo a realizar para posteriormente implementar el software de dron que permita obtener el resultado.
Podemos, entonces, establecer 3 pasos para realizar el trabajo, a saber, primero asegurarnos de que la data recogida en campo sea confiable y correcta; luego, procesar esta data a fin de obtener una ortofoto y un modelo de elevación digital (DEM); para finalmente, utilizando el modelo creado, generar una superficie en AutoCAD (o similar) así como el ‘line-work’ (trabajo en línea) y el levantamiento final. Analicemos los pasos enunciados en detalle:
Recoger data valida en campo
Para que los equipos realicen un correcto recojo de información se requiere que los operadores hayan sido entrenados previamente en las mejores practicas que permitan establecer tanto el control a tierra, como tener un software piloto automático configurado para crear cartografía topográfica.
Para el caso del ajuste de control a tierra del dron, se debe tener en cuenta los mismos criterios utilizados para una fotogrametría convencional. La practica indica que establecidos los objetivos y analizados estos mediante levantamiento sobre el terreno y sus alrededores, lo ideal es establecer cinco objetivos por area de vuelo, 4 en las esquinas y uno al centro pudiéndose incluir mas objetivos de acuerdo a las características de la zona (puntos altos o bajos).
Luego, se configura el piloto automático, teniendo en cuenta el sobrepasar ligeramente cada control en ambos lados y capturar dos líneas de fotos más allá de cada punto de control utilizando una interfaz gráfica similar a la de Google Earth que permita trazar el area del terreno y establecer la altitud del vuelo.
La obtención de la ortofoto y el DEM
El segundo paso es procesar las fotos tomadas por el dron para generar la ortofoto y el DEM. Para este proceso se puede escoger entre las múltiples soluciones existentes en el mercado teniendo en cuenta que el proceso sigue la misma lógica que la fotogrametría convencional. Con esto queremos decir que las fotos se superponen basadas en los puntos de tierra compartidos a través de fotos superpuestas.
Debemos tener en cuenta que los drones utilizan cámaras mas pequeñas y no calibradas en comparación con las usadas en fotogrametría. Por ello deben tomarse muchas fotos para lograr una alta superposición. Ello implica, para cada punto del suelo, una cantidad que oscila entre 9 y 16 fotos, las cuales mediante la técnica de reconocimiento de imágenes usada por el programa elegido se identificarán los ‘puntos de amarre’ compartidos en las fotos.

Extracción de la superficie de levantamiento y trabajo en linea
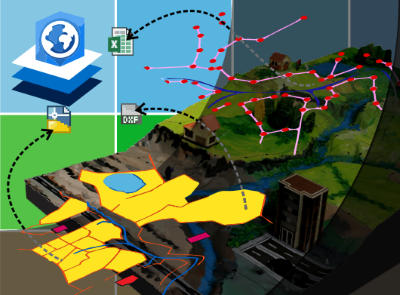
Es en este último paso que la mayoría de las empresas consultoras en levantamiento topográfico tienen mayores dificultades debido a que la mayoría de programas de modelado en 3D (como por ejemplo Civil 3D) no están diseñados para trabajar con los grandes modelos de superficie generados por los programas de dron. Es por ello que las soluciones de post procesamiento emergen como las adecuadas para esta tarea.
Mediante aquellos, el topógrafo elige los puntos de trabajo haciendo clic sobre aquellos puntos deseados en la imagen digital. Cada uno de estos es registrado por el programa como un par de coordenadas.
Cada punto es, entonces, ubicado en capas que coincidan con las convenciones establecidas por Civil 3D (o el que utilice) de tal forma que al abrir el archivo en dicho programa los puntos tengan formato similar a aquellos provenientes de una estación GPS rover estándar o una estación total.
Conclusiones
Siguiendo esta metodología de trabajo se puede conseguir un dramático ahorro de tiempo y dinero en los proyectos de cartografía topográfica, estimándose en un 80% el ahorro respecto al tiempo. Podemos comprobar esto comparando la captura de puntos mediante topografía convencional realizado por un perito en 60 puntos por hora con los 60 puntos tomados en un segundo por software de post procesamiento.
Finalmente recordar siempre que la clave del éxito y ahorro en tiempo de trabajo estriba en identificar la secuencia de trabajo adecuada que producirá el resultado deseado de la forma más eficiente posible.